|
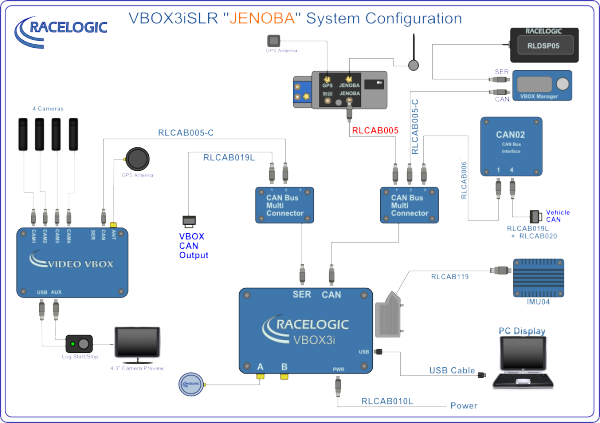
《特 徴》
《サンプルデータ》
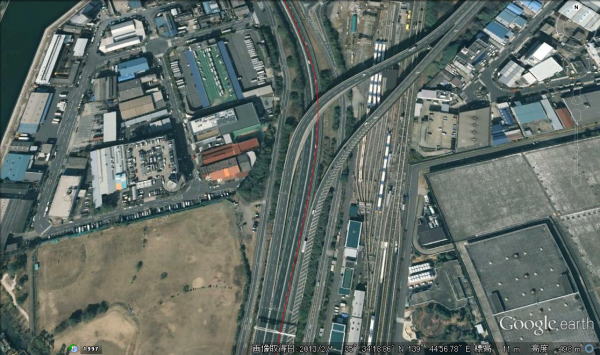
以下の画像は、RTK-GPS補正を行いながら、高速道路を走行したものです。
走行ルート: 首都高速神奈川1号横羽線(K1) 下り 昭和島~横浜まで
セッティング:
基地局の補正電波には、ジェノバ社の仮想基準点補正を利用しました。
仮想基準点は、固定基準点を設置する必要がなく、携帯電話回線を利用して補正電波を受信できるため、市街地試験では最適なオプションです。
仮想基準点に関する詳しい説明は、ジェノバ社のWEBをご確認ください。
http://www.jenoba.jp/index.html
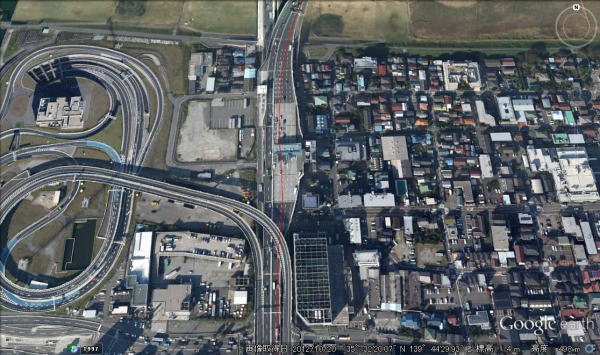
高架下を通過してもブレることなく、高精度な緯度経度計測を維持します。
少し長いトンネルであっても、位置精度を維持することが可能です。(車輪速補正を行う必要があります。)
RTKが外れてから4秒間は2cm精度を維持することが可能です。その後、徐々に精度が落ちてしまいますが、7秒程度のトンネルを抜けても誤差はほとんどありませんでした。
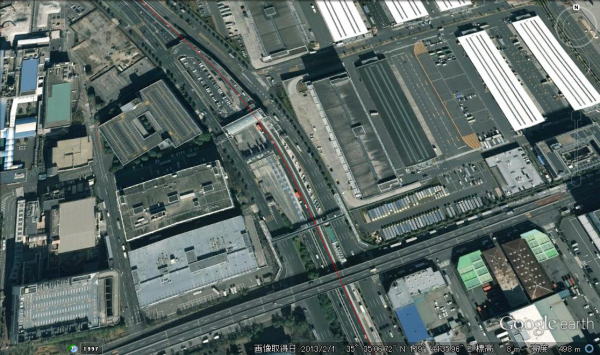
  
ETCゲートの通過も、きれいな走行軌跡データが取れています。
  
《ダウンロード》
 仮想基準点 - RTK測位のカタログ 仮想基準点 - RTK測位のカタログ
IMU04補正のカタログ
 V2.6VBOX Setupソフトウェアを使った設定手順書(固定基地局、デュアル、補正ON) V2.6VBOX Setupソフトウェアを使った設定手順書(固定基地局、デュアル、補正ON)
V2.6VBOX Setupソフトウェアを使った設定手順書(固定基地局、デュアル、補正OFF)



|
