R79 かじ取り装置試験方法
CSF(補正操舵機能)の警報装置の試験
■ 試験概要
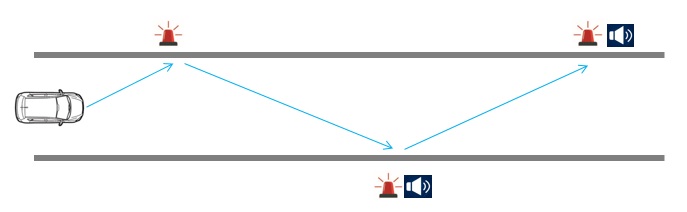
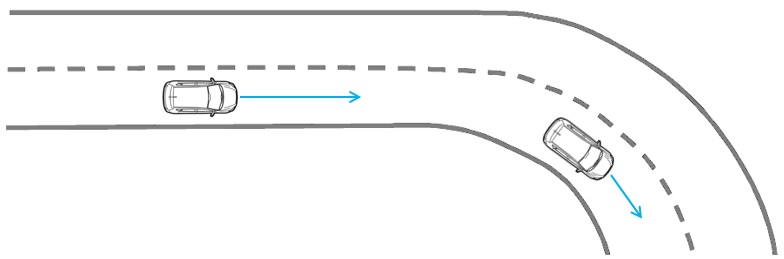
CSFが作動した状態で、両側にレーンマーキングがある路面を走行します。 車両が車線から逸脱しそうな状況を作り、CSFが指定の時間より長く維持されることを確認します。
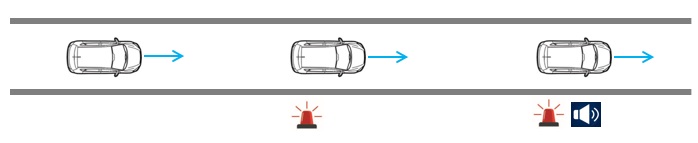
CSFが介入している間は、光学警報信号を提供する必要があります。
2,3回目の介入では、光学警報に加えて、音響警報も提供する必要があります。
3回目の介入では、音響警報信号は1,2回目より10秒長いことが必要です。
■ 推奨機器
Video VBOX Pro 20Hz 4カメラキット
メーター撮影用 広角カメラキット
音響計測の計測には、騒音計の利用も効果的です。
■ 試験方法
Video VBOX を4カメラモードにして、ステアリングを含む正面・メーター・右車輪・左車輪を撮影します。
光学警報はメーターの映像から判断します。
音響警報はVideo VBOXのマイクから記録し、判断します。
CSFの機能は、車輪の映像から判断します。

本試験は、Video VBOXのみで、十分な計測が可能です。
■ オーバーライド試験
<追加必要機材>
アナログ入力モジュール (アナログの操舵力計の入力用)
オーバーライド試験用 操舵力計(アナログ出力もしくはCAN出力)
注:操舵力計の取り扱いはありません。他社製品をご用意ください。
<試験方法>
操舵力計の値をVideo VBOXに入力して、試験を行います。
CSFの機能を無効にするための操舵力が50Nを超えていないことを確認します。
ESF(緊急回避操舵機能)の自動回避の試験 タイプa
■ 試験概要
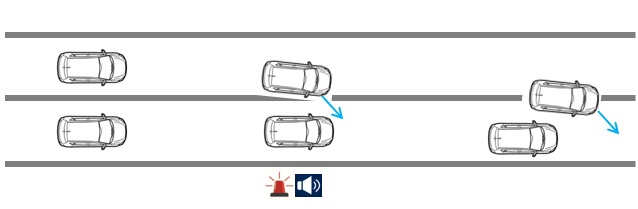
2車線の走行路で、隣接する車両が近づいてくるもしは車線変更を開始してくるような状況を模擬をして、ESFが介入することを確認します。
ESFが介入開始するまで、指定の警告が出力されることが必要です。
ESFの介入によって、元々の車線から外れることがないことが必要です。
■ 推奨機器
VBOX3i SLR
Basestationもしくは仮想基準点
Video VBOX Pro 20Hz 4カメラキット
メーター撮影用 広角カメラキット
音響計測の計測には、騒音計の利用も効果的です。
■ 試験方法
Video VBOX を4カメラモードにして、ステアリングを含む正面・メーター・右車輪・左方向(接近車両)を撮影します。
Video VBOXにESF on/off(車両CAN) のフラグ信号を入力します。
光学警報はメーターの映像から判断します。
音響警報はVideo VBOXのマイクから記録し、判断します。
ESFの機能及び車線からの逸脱がないことを、車輪の映像から判断することができます。
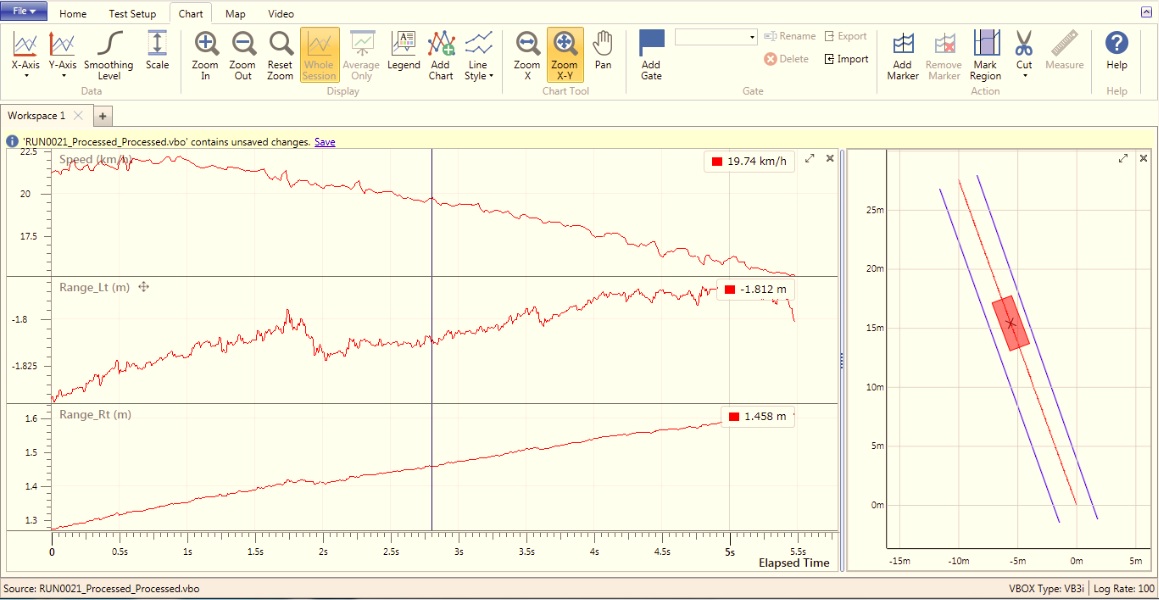
VBOX3iSLRを使用すると、車線と評価車両の位置関係、接近車両との位置関係をデータ化することが可能で、より詳細な解析を行うことが可能です。
ESF(緊急回避操舵機能)の自動回避の試験 タイプb
■ 試験概要
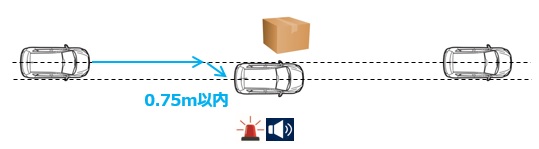
走行している車線の先に、なんらかの物体があった場合に、ESFが介入することを確認します。
物体は車線マークを踏み越えなくても通過できる大きさで、かつそのように配置します。
ESFの介入により、衝突を回避するか、軽減されることが必要です。
ESFが介入開始するまで、指定の警告が出力されることが必要です。
ESFの介入によって、元々の車線から外れることがないことが必要です。
(車線のない道路では、横方向距離は0.75m以内であることが必要です。)
■ 推奨機器
VBOX3i SLR
Basestationもしくは仮想基準点
Video VBOX Pro 20Hz 4カメラキット
メーター撮影用 広角カメラキット
音響計測の計測には、騒音計の利用も効果的です。
■ 試験方法
Video VBOX を4カメラモードにして、ステアリングを含む正面・メーター・右車輪・左方向(物体)を撮影します。
Video VBOXにESF on/off(車両CAN) のフラグ信号を入力します。
光学警報はメーターの映像から判断します。
音響警報はVideo VBOXのマイクから記録し、判断します。
ESFの機能及び車線からの逸脱がないことを、車輪の映像から判断することができます。
VBOX3iSLRを使用すると、車線と評価車両の位置関係、接近車両との位置関係をデータ化することが可能で、より詳細な解析を行うことが可能です。
車線のない道路では、VBOX3iSLRをStatic Pointモードで使用します。
本モードを使用することで、横移動距離を2cm精度で計測することが可能です。(使用チャンネル LatRtg-tg1)
詳細はStatic Pointモードのページをご確認ください。
ACSF(自動命令型操舵機能)のレーン維持機能の試験
■ 試験概要
車両メーカーは、レーン維持機能が正しく動作する最大横加速度aysmax を自己申告で定めます。
試験は、下の表の各速度域で行います。
| カテゴリM1, N1 |
10 - 60 km/h |
60 - 100 km/h |
100 - 130 km/h |
130 km/h 以上 |
| カテゴリM2, M3, N2, N3 |
10 - 30 km/h |
30 - 60 km/h |
60 km/h 以上 |
|
運転者はステアリングから両手を離した状態で、両側にレーンマーキングのあるカーブを走行します。
カーブ走行中の横加速度は、aysmax の80- 90%の範囲に入っている必要があります。(カーブの曲率と速度で調整します。)
試験中、車両が白線を越えてはいけません。
横ジャーク(0.5秒の移動平均フィルターを適用したもの)が5m/s2を超えてはいけません。
■ 推奨機器
VBOX3i SLR+IMU04
Basestationもしくは仮想基準点
高性能IMUストラット
Video VBOX Pro 20Hz 4カメラキット
メーター撮影用 広角カメラキット
■ 試験方法
VBOX3iSLR+IMU04をLane Departure モードで使用します。
本モードを使用することで、白線との距離を2cm精度で計測することが可能です。
詳細はLDWコーナーのページをご確認ください。
*白線逸脱の判定は、Video VBOXの映像からでも判定は可能です。
IMUストラットを使って、IMU04を車両重心点付近に設置します。
横加速度は、IMU04の「Accel_Y」チャンネルを使用します。
横ジャークは、IMU Atitudeの「Lat_Jerk」チャンネルを使用します。
Video VBOX を4カメラモードにして、ステアリングを含む正面・メーター・右車輪・左車輪を撮影します。
Video VBOX及びVBOX3iSLRに、レーン維持機能のon/off(車両CAN) のフラグ信号を入力します。
光学警報はメーターの映像から判断します。
音響警報はVideo VBOXのマイクから記録し、判断します。
レーン維持機能で車線からの逸脱がないことを、車輪の映像から判断することができます。
■ オーバーライド試験
<追加必要機材>
アナログ入力モジュール (アナログの操舵力計の入力用)
オーバーライド試験用 操舵力計(アナログ出力もしくはCAN出力)
注:操舵力計の取り扱いはありません。他社製品をご用意ください。
<試験方法>
操舵力計の値をVBOX3iSLR及びVideo VBOXに入力して、試験を行います。
CSFの機能を無効にするための操舵力が50Nを超えていないことを確認します。
ACSF(自動命令型操舵機能)の最大横加速度の試験
■ 試験概要
車両メーカーは、レーン維持機能が正しく動作する最大横加速度aysmax を自己申告で定めます。
試験は、下の表の各速度域で行います。
| カテゴリM1, N1 |
10 - 60 km/h |
60 - 100 km/h |
100 - 130 km/h |
130 km/h 以上 |
| カテゴリM2, M3, N2, N3 |
10 - 30 km/h |
30 - 60 km/h |
60 km/h 以上 |
|
運転者はステアリングから両手を離した状態で、両側にレーンマーキングのあるカーブを走行します。
カーブの曲率と走行速度は、技術機関がaysmax +0.3m/s2 以上の加速度を発生させるように定めます。
カーブ走行中の横加速度は、3m/s2以下もしくはaysmax+0.3m/s2 以下である必要があります。(カテゴリーM1, N1)
横ジャーク(0.5秒の移動平均フィルターを適用したもの)が5m/s2を超えてはいけません。
■ 推奨機器
VBOX3i SLR+IMU04
Basestationもしくは仮想基準点
高性能IMUストラット
■ 試験方法
VBOX3iSLR+IMU04をLane Departure モードで使用します。
IMUストラットを使って、IMU04を車両重心点付近に設置します。
横加速度は、IMU04の「Accel_Y」チャンネルを使用します。
横ジャークは、IMU Atitudeの「Lat_Jerk」チャンネルを使用します。
ACSF(自動命令型操舵機能)のハンズオン(転移)試験
■ 試験概要
ACSFが作動した状態で、両側にレーンマーキングがある路面を走行します。 走行路は、ドライバーが介入せず、少なくとも65秒以上走行を継続できる走行路を選ぶ必要があります。
ドライバーは走行中にステアリングから手を離します。
車両はACSFが解除されるまで、運転を続ける必要があります。
ステアリング操作の停止から遅くとも15秒以内に光学警報信号を提供する必要があり、ACSFが無効化されるまで光学警報信号を提供する必要があります。
ステアリング操作の停止から遅くとも30秒以内に音響警報信号を提供する必要があり、ACSFが無効化されるまで音響警報信号を提供する必要があります。
ACSFは、音響警報信号の開始から遅くとも30秒以内に、5秒の音響緊急信号を発して、無効化される必要があります。
車両速度は、低速域と高速域の両方で試験します。
■ 推奨機器
Video VBOX Pro 20Hz 4カメラキット
メーター撮影用 広角カメラキット
音響計測の計測には、騒音計の利用も効果的です。
■ 試験方法
Video VBOX を4カメラモードにして、ステアリングを含む正面・メーター・右車輪・左車輪を撮影します。
光学警報はメーターの映像から判断します。
音響警報はVideo VBOXのマイクから記録し、判断します。
ACSFの機能は、車輪の映像から判断します。
ACSF(自動命令型操舵機能)の自動車線変更機能の試験
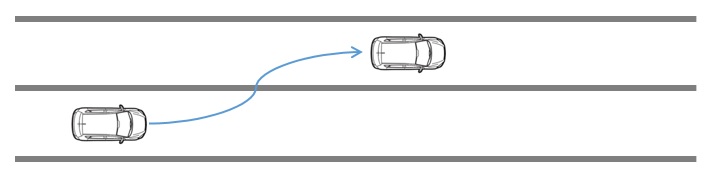
■ 試験概要
2車線の走行路で、隣の車線の車両が通過した後に、自動車線変更が開始されることを確認します。
横移動は、自動車線変更手順開始後1秒経過するまで開始しないことが必要です。
横加速度は、1m/s2を超えてはいけません。
横ジャーク(0.5秒の移動平均フィルターを適用したもの)は、5m/s2を超えてはいけません。
自動車線変更手順の開始から操作開始までは、3秒以上かつ5秒以下でなければなりません。
車線変更操作は5秒未満で完了しなければなりません。(カテゴリ M1, N1)
■ 推奨機器
VBOX3i SLR+IMU04
Basestationもしくは仮想基準点
高性能IMUストラット
Video VBOX Pro 20Hz 4カメラキット
メーター撮影用 広角カメラキット
■ 試験方法
VBOX3iSLR+IMU04を3Targetモード(車両数は2台)で使用します。
本モードを使用することで、「車間距離」と「中央の白線までの距離」を2cm精度で計測することが可能です。
詳細は3Target モードのページをご確認ください。
IMUストラットを使って、IMU04を車両重心点付近に設置します。
横加速度は、IMU04の「Accel_Y」チャンネルを使用します。
横ジャークは、IMU Atitudeの「Lat_Jerk」チャンネルを使用します。
Video VBOX を4カメラモードにして、ステアリングを含む正面・メーター・右車輪・左車輪を撮影します。
Video VBOX及びVBOX3iSLRに、自動車線変更開始(車両CAN)及びウィンカー のフラグ信号を入力します。
ウィンカーの表示はメーターの映像からも判断することができます。
■ オーバーライド試験
<追加必要機材>
アナログ入力モジュール (アナログの操舵力計の入力用)
オーバーライド試験用 操舵力計(アナログ出力もしくはCAN出力)
注:操舵力計の取り扱いはありません。他社製品をご用意ください。
<試験方法>
操舵力計の値をVideo VBOX 及びVBOX3iSLR に入力して、試験を行います。
自動車線変更の機能を無効にするための操舵力が50Nを超えていないことを確認します。
ACSF(自動命令型操舵機能)のセンサー性能試験
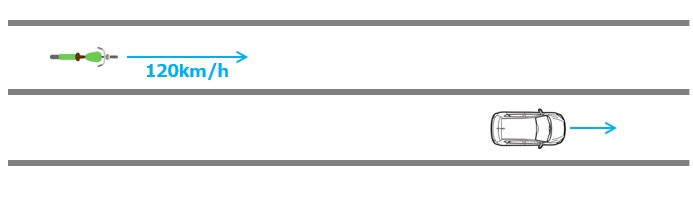
■ 試験概要
2車線の走行路で、隣の車線をバイクが120km/hで後ろから走ってきます。評価車両がバイクを認識したときの車間距離を計測して記録します。
■ 推奨機器
VBOX3i SLR+IMU04
Basestationもしくは仮想基準点
■ 試験方法
VBOX3iSLR+IMU04を3Targetモード(車両数は2台)で使用します。
本モードを使用することで、「車間距離」と「中央の白線までの距離」を2cm精度で計測することが可能です。
詳細は3Target モードのページをご確認ください。
ACSF(自動命令型操舵機能)のセンサー失陥試験 フェーズ2
■ 試験概要
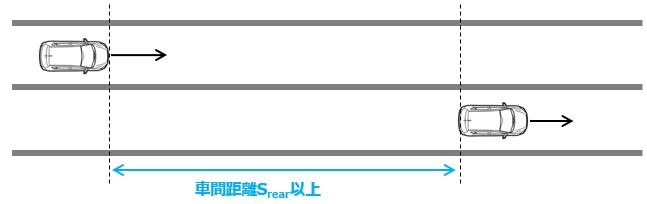
2車線の走行路で、隣の車線を車両が走行します。
隣の車線の車両は後方に、車間距離Srear以上の距離を走行します。
評価車両が後方の車両を認識しなかった場合に、自動車線変更操作が開始されないことが必要です。
■ 推奨機器
VBOX3i SLR+IMU04
Basestationもしくは仮想基準点
■ 試験方法
VBOX3iSLR+IMU04を3Targetモード(車両数は2台)で使用します。
本モードを使用することで、「車間距離」と「中央の白線までの距離」を2cm精度で計測することが可能です。
詳細は3Target モードのページをご確認ください。
ACSF(自動命令型操舵機能)のセンサー失陥試験 フェーズ3
■ 試験概要
2車線の走行路で、隣の車線を車両が走行します。
隣の車線の車両は後方に、車間距離Srear以上の距離を走行します。
評価車両が後方の車両を認識した場合に、自動車線変更操作が開始されることが必要です。
■ 推奨機器
VBOX3i SLR+IMU04
Basestationもしくは仮想基準点
■ 試験方法
VBOX3iSLR+IMU04を3Targetモード(車両数は2台)で使用します。
本モードを使用することで、「車間距離」と「中央の白線までの距離」を2cm精度で計測することが可能です。
詳細は3Target モードのページをご確認ください。
|