マルチターゲット車間距離計測(3Target & 2Target)
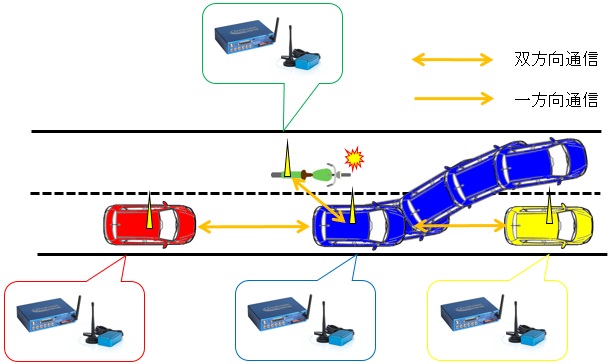
<3 Target>
VBOX ADASシステムは、無線機を変更することで、最大ターゲット車両3台までの車間距離計測を行うことができます。
ターゲット車両3台の車間距離計測は、UNR79:自動レーンチェンジ機能の評価を行うために開発された機能です。
* 利用するにはVBOX3iファームウェアV2.6が必要です。
各車両は双方向通信を行っており、SV(評価車両)ではTG(ターゲット車両)すべての車間距離を確認することが出来ます。各TG車両では、SV車両との車間距離を確認することが出来ます。
また、白線(直線のみ)との距離も同時に確認が出来るように改良されています。
必要な無線機:
3 Target無線機(サーバー) RLRTM243TS-JP 1台
3 Targer無線機(クライアント) RLRTM243TC-JP 3台
*上記無線機は、すでに所有している無線機の設定変更をして、利用することも出来ます。アップグレードをご希望のお客様は弊社までご相談ください。
測定チャンネル:
■SV 車両
・TG車両1 との 車間距離
・TG車両1 との 縦車間距離(SV座標)
・TG車両1 との 横車間距離(SV座標)
・TG車両1 との 縦車間距離(REFライン基準)
・TG車両1 との 横車間距離(REFライン基準)
・TG車両1 との 縦車間距離(TG1座標)
・TG車両1 との 横車間距離(TG1座標)
・TG車両1 の RTKステータス
・TG車両1 の 速度
・TG車両1 のいる 角度
・TG車両1 と REFラインの距離
・SV車両 と REFラインの距離
・SV車両 の RTKステータス
・TG車両2 との 車間距離
・TG車両2 との 縦車間距離(SV座標)
・TG車両2 との 横車間距離(SV座標)
・TG車両2 との 縦車間距離(REFライン基準)
・TG車両2 との 横車間距離(REFライン基準)
・TG車両2 との 縦車間距離(TG1座標)
・TG車両2 との 横車間距離(TG1座標)
・TG車両2 の RTKステータス
・TG車両2 の 速度
・TG車両2 のいる 角度
・TG車両2 と REFラインの距離
・TG車両3 との 車間距離
・TG車両3 との 縦車間距離(SV座標)
・TG車両3 との 横車間距離(SV座標)
・TG車両3 との 縦車間距離(REFライン基準)
・TG車両3 との 横車間距離(REFライン基準)
・TG車両3 との 縦車間距離(TG1座標)
・TG車両3 との 横車間距離(TG1座標)
・TG車両3 の RTKステータス
・TG車両3 の 速度
・TG車両3 のいる 角度
・TG車両3 と REFラインの距離
・TG車両3 との衝突予測時間 TTC1 (TTCはTG車両3のみ)
■TG1 車両
・SV車両 との 車間距離
・SV車両 との 縦車間距離(SV座標)
・SV車両 との 横車間距離(SV座標)
・SV車両 との 縦車間距離(REFライン基準)
・SV車両 との 横車間距離(REFライン基準)
・SV車両 との 縦車間距離(TG1座標)
・SV車両 との 横車間距離(TG1座標)
・SV車両 の RTKステータス
・SV車両 の 速度
・SV車両 のいる 角度
・TG車両1 と REFラインの距離
・TG車両1 の RTKステータス
・TG車両2 の RTKステータス
・TG車両3 の RTKステータス
■TG2 車両
・SV車両 との 車間距離
・SV車両 との 縦車間距離(SV座標)
・SV車両 との 横車間距離(SV座標)
・SV車両 との 縦車間距離(REFライン基準)
・SV車両 との 横車間距離(REFライン基準)
・SV車両 との 縦車間距離(TG1座標)
・SV車両 との 横車間距離(TG1座標)
・SV車両 の RTKステータス
・SV車両 の 速度
・SV車両 のいる 角度
・TG車両2 と REFラインの距離
・TG車両2 の RTKステータス
・TG車両1 の RTKステータス
・TG車両3 の RTKステータス
■TG3 車両
・SV車両 との 車間距離
・SV車両 との 縦車間距離(SV座標)
・SV車両 との 横車間距離(SV座標)
・SV車両 との 縦車間距離(REFライン基準)
・SV車両 との 横車間距離(REFライン基準)
・SV車両 との 縦車間距離(TG1座標)
・SV車両 との 横車間距離(TG1座標)
・SV車両 の RTKステータス
・SV車両 の 速度
・SV車両 のいる 角度
・TG車両3 と REFラインの距離
・TG車両3 の RTKステータス
・TG車両1 の RTKステータス
・TG車両2 の RTKステータス
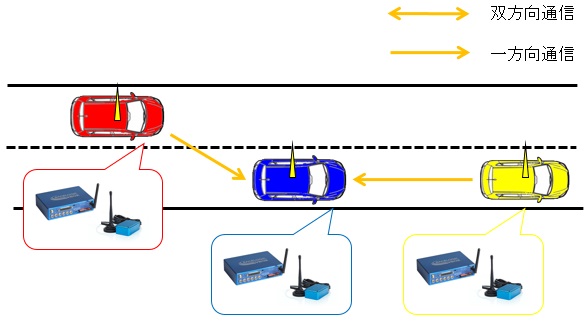
<2 Target>
従来のTG車両2台の車間距離計測モードも利用することができます。 こちらは無線通信は100Hzですが、一方向通信に制限されていますので、ご注意ください。
必要な無線機:
Multi Target無線機(サーバー) RLRTM24MTS-JP 1台
Multi Targer無線機(クライアント) RLRTM24MTC-JP 2台
測定チャンネル:
■SV 車両
・TG車両1 との 車間距離
・TG車両1 との 縦車間距離(SV座標)
・TG車両1 との 横車間距離(SV座標)
・TG車両1 との 縦車間距離(REFライン基準)
・TG車両1 との 横車間距離(REFライン基準)
・TG車両1 との 縦車間距離(TG1座標)
・TG車両1 との 横車間距離(TG1座標)
・TG車両1 との 相対速度(SV座標)
・TG車両1 との 縦相対速度(SV座標)
・TG車両1 との 横相対速度(SV座標)
・TG車両1 との 衝突予測時間 TTC1
・TG車両1 との 衝突予測時間 TTC2
・TG車両1 の RTKステータス
・TG車両1 の 速度
・TG車両1 の 加速度
・TG車両1 の ヨーレート
・TG車両1 のいる 角度
・SV車両 の RTKステータス
・TG車両2 との 車間距離
・TG車両2 との 縦車間距離(SV座標)
・TG車両2 との 横車間距離(SV座標)
・TG車両2 との 縦車間距離(REFライン基準)
・TG車両2 との 横車間距離(REFライン基準)
・TG車両2 との 縦車間距離(TG1座標)
・TG車両2 との 横車間距離(TG1座標)
・TG車両2 との 相対速度(SV座標)
・TG車両2 との 縦相対速度(SV座標)
・TG車両2 との 横相対速度(SV座標)
・TG車両2 との 衝突予測時間 TTC1
・TG車両2 との 衝突予測時間 TTC2
・TG車両2 の RTKステータス
・TG車両2 の 速度
・TG車両2 の 加速度
・TG車両2 の ヨーレート
・TG車両2 のいる 角度
■TG1 車両
車間距離チャンネルは、計測できません。
■TG2 車両
車間距離チャンネルは、計測できません。
| 

