Technology Information

About GPS
|
|
GPS�iGlobal Positioning System�j�́A���{��ł́w�S�n�����ʃV�X�e���x�ƌĂ�A�A�����J�ɂ���ĊJ������A�^�p����Ă���q�����ʃV�X�e���ł��B
GPS�͌����A�R���I���p�̂��߂ɊJ�����ꂽ�V�X�e���ł����A���ݖ��Ԃ̗��p���F�߂��A�S���E�̗��p�҂ɖ����ŊJ������Ă��܂��B�@�������A���Ԃɂ͊J������Ă��Ȃ��M��������܂��B
GPS�̖ړI�́A
1 - �D����q��@�����A���^�C���Ɍ��݂̈ʒu��m��A�ړI�n�܂ł̋��������E���[�g��T������u�q�@�x���v
2 - �������ꂽ�ʒu�ŒʐM����ꍇ�̐��m�ȁu���������v �@�@�@��2�ł��B�@
�����I�Ɂu���n�E���ʁv�Ȃǂɂ����p����Ă��܂��B
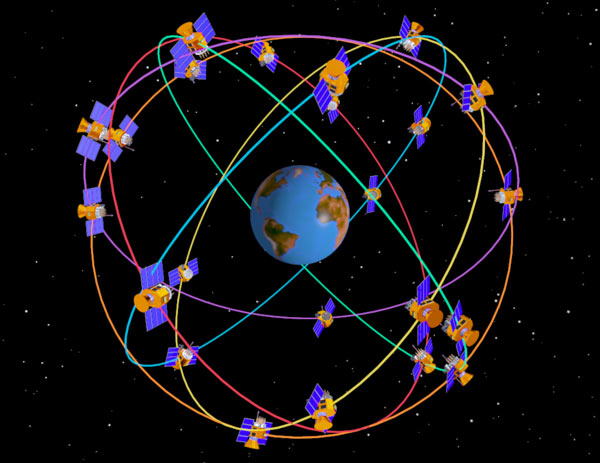
GPS�q���́A6�̋O���ɍ��v31�@�z������A�n����̂ǂ�����ł��펞4�@�ȏ�̉q�����ǍD�Ȋw�I�z�u�̂��ƂŊϑ��ł���悤�ɉ^�p����Ă��܂��B
GPS�q���́A���r�W�E���iRb�j��Z�V�E���iCs�j��p�������q���v�𓋍ڂ��A�����x�̎��������M�����悹���d�g��n���Ɍ����đ��M���Ă��܂��B�@����ɑ��ʌv�Z�i�ʒu����j�̂��߂ɉq���O�����Ȃǂ̏������̐M���ɏd�˂đ��M���Ă��܂��B�@
GPS�q�����瑗�M�����d�g�i�����g�j�ɂ́AL1�сi1575.42MHz�j��L2�сi1227.6 MHz�j�ƌĂ��2�̎��g���т̐M��������܂��B�@
�q������̏��ɂ��ẮA�����A���ԗ��p�����ɂ����Č덷��t�����鑀�삪�s���Ă��܂������A2005�N5���ɉ�������A���݂ł͒N�������m�ȏ�����肷�邱�Ƃ��ł��܂��B
|
GPS�̈ʒu����
|
|
VBOX�ō̗p����Ă���GPS�̑��ʕ��@�́A3��ނł��B
[�P�Ƒ���]
�J�[�i�r�Q�[�V�����V�X�e���Ȃǂō̗p����Ă���ł���{�I�ȑ��ʕ��@�ł��B�@�ʒu���x��3m���x�B
�P�Ƒ��ʂ̊�{�R���Z�v�g�͉F����Ԃňʒu�̂킩���Ă���q������n�㖢�m�_�܂ł̋����𑪒肷�邱�Ƃł��B�@�����āA�����̉q������̋������ɑ��邱�Ƃɂ��n�㖢�m�_�̈ʒu�����肵�܂��B�@
���̊T���̃v���Z�X�͎��̒ʂ�ł��B
�@ �q������̋����v��
GPS�q���͋ɂ߂Ĉ��肵�����q���v�𓋍ڂ��A�����x�̎��������M���i�R�[�h�j���悹���d�g��n���Ɍ����đ��M���Ă��܂��B�@GPS��M�@�̓����ɂ����Ԃ����ސ������v���g�ݍ��܂�Ă���A��M�@���Ŏ�M�����f�[�^����ɁA�q�������M�@�܂ł̓d�g�`�����Ԃ��v�����܂��B�@���̓d�g�`�����ԂɌ����x���悶�邱�Ƃɂ���ĉq�������M�@�܂ł̋����������܂��B
�A �q���ʒu�̌v�Z
�q���̈ʒu�́A�q���d�g�ɏ���Ă���O�����i�A���}�i�b�N�j�����M�@���Ōv�Z����܂��B
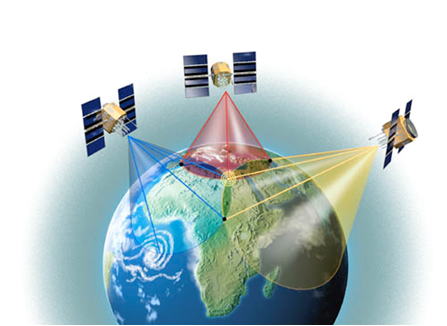
�B ���ʌv�Z
���ʌv�Z�́A�@�A�ŋ��߂�ꂽ�l�𗘗p���Čv�Z����܂��B�@�܂��A��M�@��3�����ʒu�ix, y, z�j�����肷�邽�߂ɂ́A���m�_�ł���3�̉q������̓d�g����M���āA�q���Ǝ�M�@�Ԃ̋������v�����܂��B�@3�̊��m�_�Ƃ��̋��������������̂ŁA���m�_�����߂�3�������������������Ƃɂ���Ď�M�@�̈ʒu�����߂邱�Ƃ��ł��܂��B�@�@
�������A���ۂ̑���ł͉q�����Œ�4��M���Ȃ��ƈʒu�����߂邱�Ƃ��o���܂���B�@���̗��R�́A��M�@���̐������v���A�q���̌��q���v�ɔ�א��x������Ă��邽�߂ł��B�@���̌��ʁA�v�����ꂽ�`�����Ԃɂ͎�M�@�̎��v�덷���܂�ł��܂��܂��B�@�����ŁA��M�@�̎��v�덷�𖢒m���i���j�Ƃ��Ĉ����A�ʒu�̖��m���ƍ��킹�Čv4�̖��m�����������ƂŁA��M�@�̈ʒu�����߂邱�Ƃ��ł��܂��B
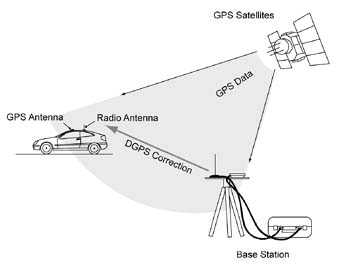
[DGPS]
Differential GPS�i���Α��ʕ����j�B�@��{�I�Ȉʒu���ʂ̌����͒P�Ƒ��ʂƓ����ł����A���ʑΏۂƂȂ�ړ��ǂ̂ق��ɁA�ʒu�̂킩���Ă���Œ��n�ǂł�GPS�d�g����M���A�덷������������@�ł��B
�Œ��n�ǂŐ������ꂽ����𑗐M���A�ړ��ǂŎ�M���邱�ƂŁA���A���^�C����DGPS�̕�������s�����Ƃ��ł��܂��B�@�덷0.4m���x�B
[RTK����]
Real Time Kinematic GPS�i�����ʕ����j�B�@
RTK���ʂ́A�f�B�t�@�����V�������ʂƓ����悤��2��̎�M�@���g�p���܂��i1�͌Œ��ǁA������͈ړ��ǁj�B�@�f�B�t�@�����V�������ʂƈقȂ�_�́A��M�@����q���܂ł̋����������g�̔g���ƈʑ������狁�߂邱�Ƃɂ���܂��B
�܂�RTK���ʂł́A���ꂼ��̎�M�@�ɂ����Ċϑ����������g�ʑ��𑪒肵�܂��B�@�ʑ��͎�M�@���Ŕ����g�̃��v���J�������A��r�����邱�ƂŒm�邱�Ƃ��ł��܂��B�@�������A���̊Ԃɂ����̔g���i�����l�o�C�A�X�j�����݂���̂��͂킩��܂���B�@���̎菇�Ƃ��āA���̐����l�o�C�A�X�����肷��K�v������܂��B
���̐����l�o�C�A�X�̌���ɂ́w�����������x�̎菇�ōs���܂��B�@�n�߂̐����l�͑O���Ő��������P�Ƒ��ʂ̎�M�@��2��g�p�����f�B�t�@�����V�������ʂ�苁�߂��܂��B�@���̉�������͈͂𐄑����A���������Ă����܂��B�@
��������܂łɎ�̎��Ԃ��|����܂����A�����l�o�C�A�X�����肷���2cm CEP�̈ʒu���x����܂��B
�܂��A�����l�o�C�A�X�����肵����͏�Ɉʑ�����ώZ���Ă��܂��B�@RTK���ʂ̎�M�@�́A���悻0.75mm�̕���\�Ŕg���i�q�������M�@�܂ł̋����j�𑪒肷�邱�Ƃ��ł���̂ŁA�ʒu���x2cm�Ƃ��������x�ȑ�����ێ����Ă��܂��B
�Ȃ��A�P�Ƒ��ʂŎg�p����L1 C/A�R�[�h�ɂ�鋗���̕���\�́A6cm�����݂̂Ƃ�����E�ƂȂ��Ă��܂��B
RTK���ʂł́A�����l�o�C�A�X�����܂�܂ł̊Ԃ�30�b���x�̎��Ԃ�������܂��B�@�����l�o�C�A�X�����܂�܂ł̉����t���[�g���i�������j�ĂсA���̐��x��20cm CEP RMS�ł��B�@����������������Ă���FIX�������܂�Ɛ��x��2cm CEP RMS�ƂȂ�܂��B
|
GPS�̑��x����
|
|
GPS�͖{���A�ʒu�����i�Ƃ��ĊJ�����ꂽ���̂ł��B�@�Ƃ��낪�A��ʓI�ɂ͒m���Ă��܂��A���̋@�\�Ƃ���GPS��M�@�͈ړ��̂̑��x����m�邱�Ƃ��ł��܂��B�@�����āA���̑��x���͈ʒu���ɔ�ׁA���ɐ��x�ǂ����肷�邱�Ƃ��ł��܂��B
�@
GPS��p�������x����ɂ�2��ނ̕��@������܂��B�@1�ڂ́A2�_�̈ʒu���狗�������߁A����2�_�Ԃ��ړ�����̂ɂ����������Ԃ���ԗ��̑��x����@�ł��B�@�������A���̕��@�͈ʒu����̐��x������GPS��M�@�ł͗��p�ł��܂���B
�@
�����ŁA�J�����ꂽ���̂�2�ڂ̕��@�ł���A����͔����g���h�b�v���[�����𗘗p������@�ł��B�@GPS�q���́A���Ɉ��肵�����̔g���E���g���̔g���o���Ă��܂��B�@�����āA�q������M�@���牓������i�߂Â��j�A�܂��͎�M�@���q�����牓������i�߂Â��j���Ƃɂ��A��M�@����M��������g�̎��g���͘A���I�ɕω����܂��B�@���̎��g���̕ω�����ړ��̂̑��x���v�Z���邱�Ƃ��ł��܂��B
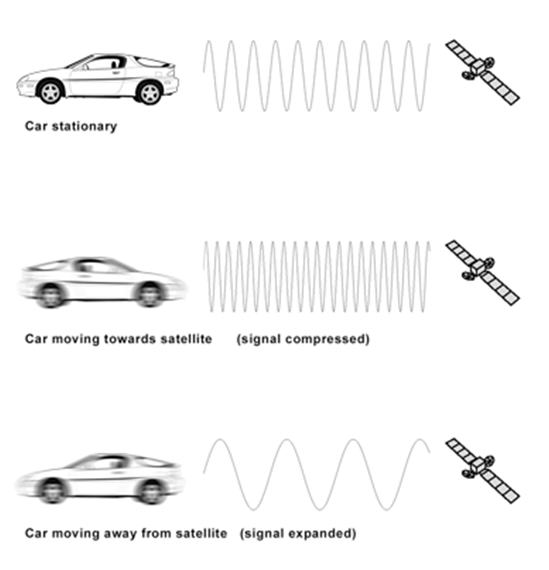
GPS�M���̃h�b�v���[���ʂ𗘗p���đ��x�����߂���@�ł́A��̉q�������̉��邱�Ƃ��o���܂��B�@GPS��M�@�͓���ꂽ���̕��ϒl�x�M���Ƃ��ďo�͂��Ă���̂ŁA�q���𑽂���M���Ă���A���ꂾ�����x�̗ǂ����肪�s���邱�ƂɂȂ�܂��B
�܂��A�d���w���̌덷�v�����قƂ�ǎȂ����߁A���ɍ������x�ő��肷�邱�Ƃ��ł��܂��B �@
��ʓI�ɑ��x�͖k���x�A�����x�A�������x�Ƃ��ċ��߂��A�k���x�Ɠ����x�͍�������A�������x�Ƃ���܂��B
�������x���x�@0.1 km/h�@
�������x���x�@0.2 km/h
���ʂ́A�k���x�Ɠ����x�̃x�N�g�������ɂ��Z�o����܂��B �@�@�@
���ʐ��x�@0.1��
|
GPS�G���[
|
|
GPS����ɂ́A�}���`�p�X�ƌĂ��G���[������܂��B�@�@
����́A���̐}�̂悤�ɉq�����甭�˂��ꂽ�d�g����������ȂǂŔ��˂��A�ʂ̌o�H�Ŏ�M�@�ɓ͂����ۂł��B
�O���ŁA���ʌv�Z�͉q�����瑗���Ă�������g�̓��B���Ԃɂ��A���������߁A4�����������������Ƃňʒu���v�Z���邱�Ƃ��m�F���܂������A�����Ŕ����g�����˂��Ă��܂��ƁA���̕������q���Ǝ�M�@�Ƃ̌������̋����������Ȃ�A���ʂƂ��Ĉʒu�̌덷�������N�����܂��B
���x�̌v�Z�����l�ɁA���˔g��ǂݎ���Ă��܂��ƁA���ڎ�M���������g�Ƃ͑S���قȂ���g������M���Ă��܂��܂��B �@
�}���`�p�X�́A�l�X�ȏ�Q���i�����A���A�d���A�n�\�Ȃǁj�Ŕ������܂��B�@GPS��M�@���g�p�ۂɂ́A��M�@�̃A���e�i��荂���ʒu�ɏ�Q�����Ȃ��A�L��������ꏊ�Ŏg�p���邱�Ƃ𐄏����܂��B�@�Ȃ��A�n�\����̔��˂͎ԗ����[�t�i�����j�̏�ɃA���e�i��ݒu���邱�ƂŖh�����Ƃ��ł��܂��B�@�@GPS��M�@���X���Ŏg�p����ۂɂ́A���̃f�[�^��͂ɏ\�����ӂ����Ă��������B
|
|
| |
|
 |